 Zum Inhalt springen
Zum Inhalt springen Auf einem Builders-Meeting vor einigen Jahren habe ich zum ersten Mal einen Builder getroffen, der sich an das Thema 2-3-2 Move gemacht hat. Seit diesem Treffen geistert ein Lösungswunsch in meinem Kopf, dass mein R2 auch so eine schöne Bewegung macht wie im Film.
Die Special Effekts-Mannschaft von Lucasfilm hat diese Bewegung nie brauchbar hinbekommen. Es gab zwar einen Droiden der mit einem Federmechanismus seinen mittleren Fuß einmal heraus schubsen konnte, dieser war danach aber kaum fahrbar und konnte seinen Fuß danach auch nicht mehr selbst „Einfahren“.
Im Film gab es also entweder einen Zweibein-Droiden, oder einen mit drei Beinen, der dann auch stabil fahren konnte.
Im internationalen Builders-Club bei Astromech.net gab es zu dieser Zeit einige Projekte, die zwar auch noch Schwierigkeiten hatten, aber zumindest in Teilen eine Machbarkeit zeigten.
Viele dieser ersten 232 Droiden waren aus einer Mischbauweise Holz, Kunststoff und zum Teil aus Aluminium. Es war schnell klar, dass ein schwerer Aluminium R2 nicht so einfach und vor allem sicher zu bewegen ist.
Erste Erkenntnis – R2 muss leichter werde
Bereits in einem ersten Gespräch mit der deutschen R2 Builder-Legende Arndt wurde mir klar, dass die aktuellen Aluminium R2’s alle viel zu schwer sind. Viele Droiden lassen sich nur mit speziellen Transportgestellen bewegen und das auch nur, wenn sie zerlegt sind.
Das erklärte dann auch meine Beobachtung in der Szene. Die Leute, die sich mit dem 232 Mechanismus beschäftigten, scheiternden meistens am Gesamtgewicht.
Entweder wurde die Bewegung sehr langsam ausgeführt oder aber der Positionswechsel führte in 2 von 6 Versuchen zum Umkippen des Droiden. Es gab auch viele „Unfälle“ bei denen sich der Mittelfuß während der Bewegung plötzlich wieder eingeklappt hat.
Auch der französische Builder CuriosMarc hat sich mit dem Problem der stabilen Mittelfußposition lange beschäftigt und diverse komplizierte Bremsfunktionen dafür entwickelt.
Nach einiger Zeit der Recherche bin ich dann auf das Konzept von Kevin Holme gestoßen. Neben einigen anderen interessanten Entwicklungen hat Kevin eine mechanische Lösung für die Beinbewegung entwickelt, die unsichtbar im Bein des Droiden läuft. Mit dieser Technik kann die Bodybewegung allein durch einen einzelnen Motor gesteuert werden.
Kevin Holmes 232 System
Auch das neue Framedesign von Kevin hat mich weiter inspiriert, obwohl das Endergebnis für mich etwas zu langsam und zu schwer war.
Übrigens läuft mein R2 mit dem Brushless Q85 Motordrive vom Kevin.
Für den Mittelfuß habe ich mich von einem deutschen R2 Builder (Marcus) inspirieren lassen. Er hat übrigens einen sehr schönen R2 mit Holzframe gebaut der einen 232-Move macht. Mehr Information dazu findet Ihr hier im deutschen Forum.

Der Mechanismus von Marcus basiert auf dem „Kniehebel-Prinzip“, was sowohl bei ausgefahrenem Fuß als auch bei der Parkposition oben im Body die Bewegung „arretiert“. Leider hat sich auf einem Event gezeigt, dass diese Mechanik nur funktioniert, wenn der Hebel auch die Position erreicht.
Bei meinen ersten Tests hatte ich genau das gleiche Problem. Es gibt zwar etwas Korrekturmöglichkeiten bei den Winkeln und Längen der beiden Hebel, aber letztlich war das für mich keine optimale Lösung.
Ein weiterer Nachteil dieser Systeme ist die Belastung der gesamten Mittelfußmechanik beim Fahren. Der Mittelfuß stützt sich im ausgefahrenen Zustand mit allen auftretenden Kräften auf das Gelenk oder bei den anderen Systemen auf die Spindeln der Motoren.
Ist der R2 recht schwer, so muss die gesamte Mechanik entsprechend „schwer“ gebaut werden.
Da mein Droide aber so leicht wie irgend möglich werden sollte, musste eine andere Lösung her.
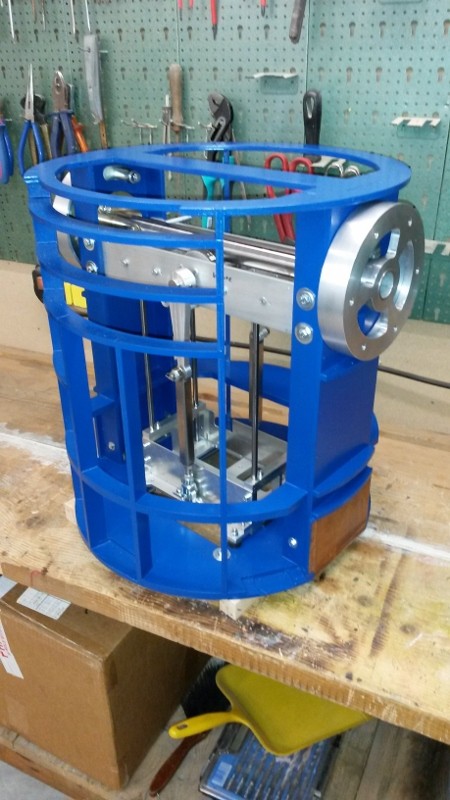
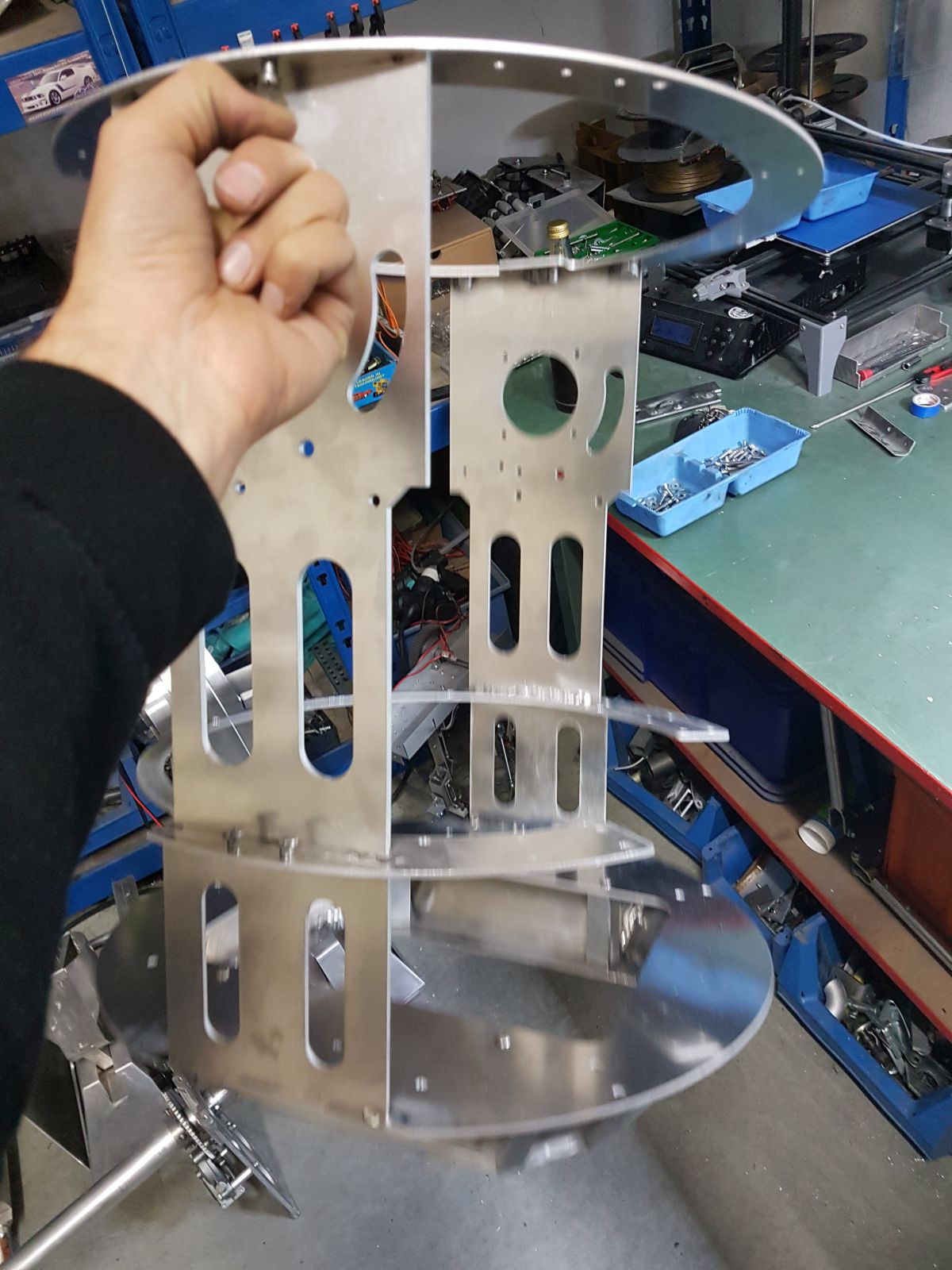
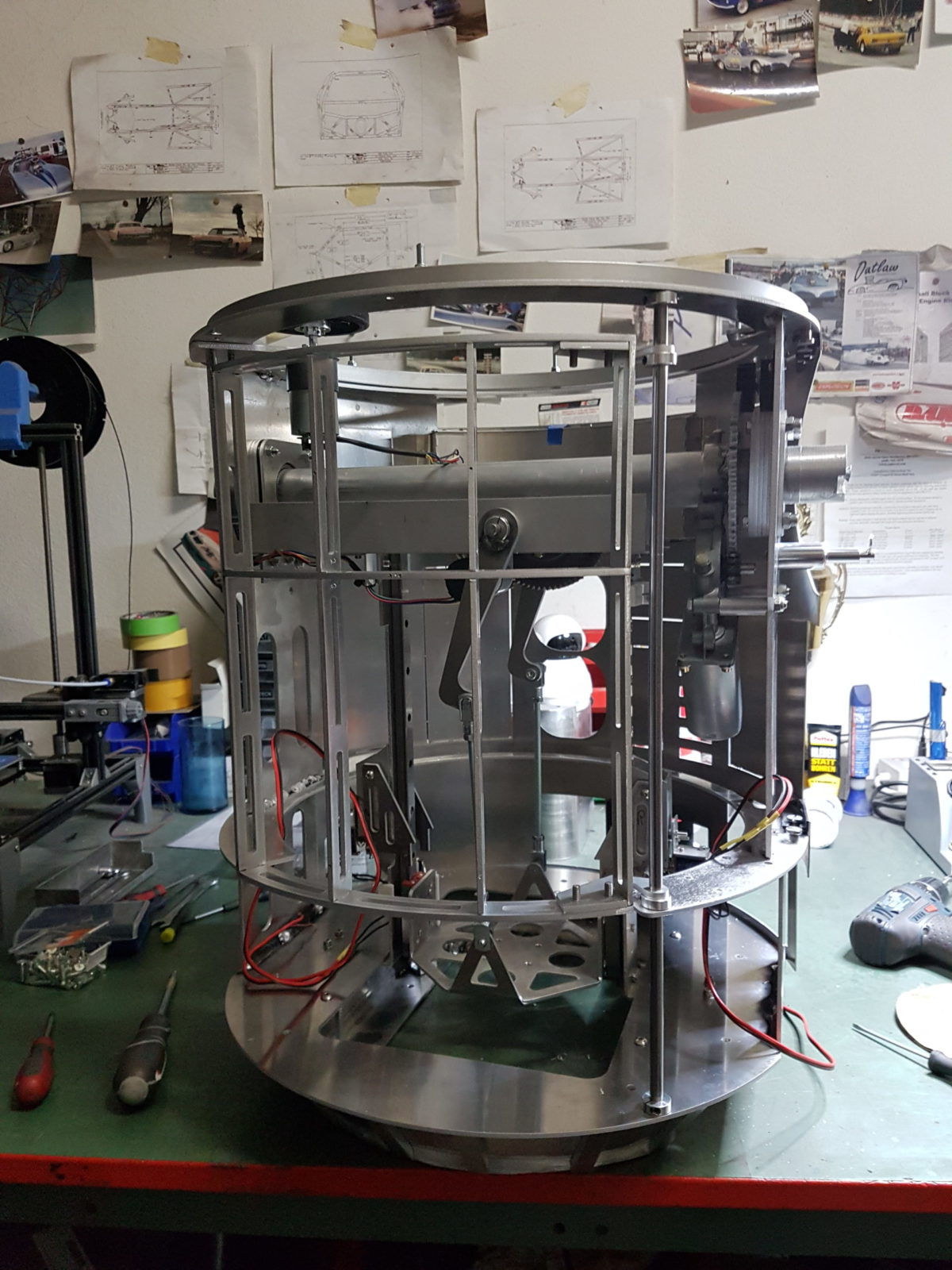
Geschweißter Leichtbau-Frame
Zunächst habe ich dann einen sehr leichten Alurahmen gebaut. Um weiter Gewicht zu sparen, wurden die einzelnen Ebenen von 6 mm auf 3 mm Materialstärke reduziert. Auch bei der Beinaufnahme bin ich von 12 mm auf 4 mm Blech herunter.
In der letzten Version habe ich dann die Seitenplatten auch noch mal auf 3 mm weiter reduziert. Dadurch war die Verbindung mit Schrauben nicht mehr möglich.
Am Ende hatte ich dann einen komplett geschweißten Frame der sich dadurch übrigens auch noch stabilisierte.


Um die notwendige Horizontal-Stabilität zu bekommen, habe ich dann die Lösung mit der Beinachse, wie sie auch bei vielen Holz- oder Kunststoffrahmen verwendet wird entschieden.
Dieser Punkt vereinfacht auch noch den Antrieb der Beinfunktion, da nur ein Motor für die Bewegung benötigt wird.
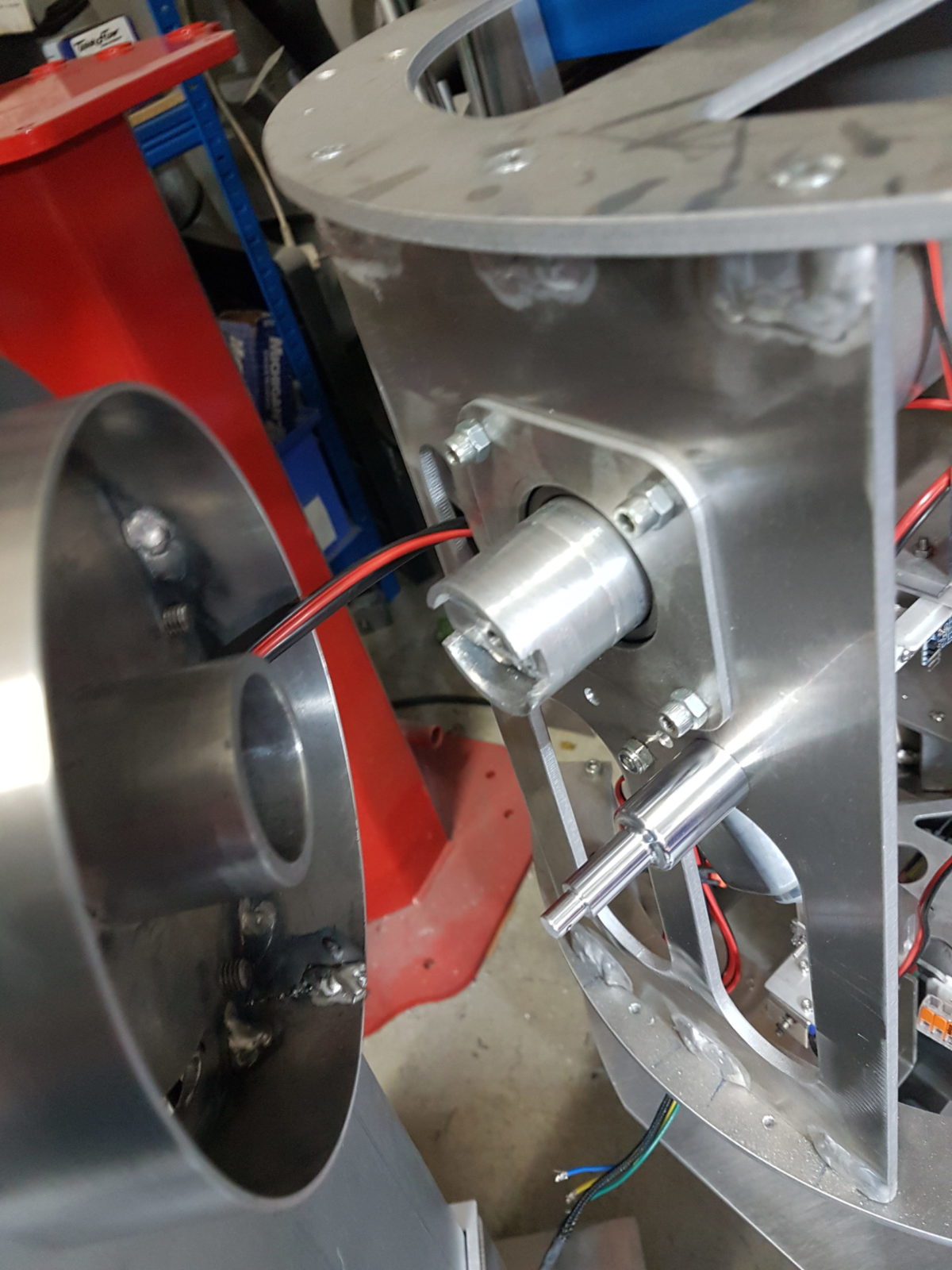
Platzsparende Mittelfußmechanik
Um später auch noch Gadgets im Body unterzubringen, brauche ich so viel Platz wie möglich. Darum habe ich mich für eine Führung der Fußmechanik mit zwei Linear lagern entschieden. Diese Lager sind einfach, stabil und leicht.


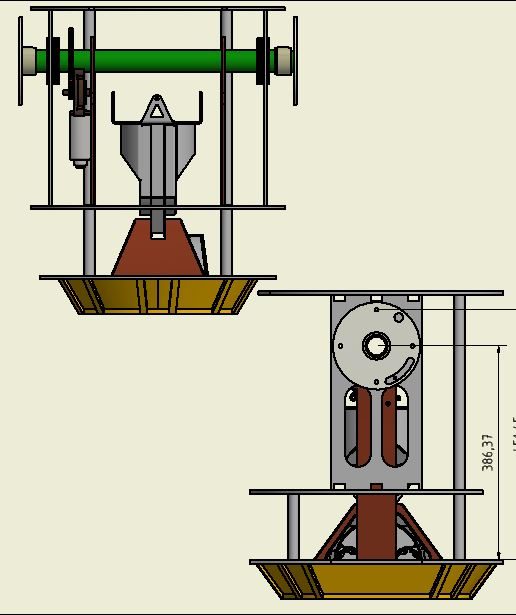
Der anfängliche Versuch den Haupthebel mit einem Riemenantrieb zu bewegen hat bei mir nicht funktioniert. Marcus hatte mir seine Daten alle gegeben, aber offenbar war mein Aluminium-Mittelfuß mit der eingebauten Federung und den Omni-Wheels einfach zu schwer.
Aber da ich nach den ersten Fahrversuchen mit meinem „Statischen“ R2D2 auf „normalem“ Straßenbelag nicht zufrieden war und deshalb ein Fahrwerk entwickelt habe, wollte ich auf dieses eben auch bei meinem 232 nicht mehr verzichten.



Die ersten Tests laufen:
Um das ganze sauber ablaufen zu lassen und auch ohne „Programmieren“ anpassen zu können, habe ich eine kleine Steuerung mit Display gebaut. Hiermit können die Positionen und Geschwindigkeiten der Motoren im Betrieb leicht angepasst werden. Denn Quellcode findet Ihr in meinem Github Repository:
https://github.com/R2ToolDroid/232-control



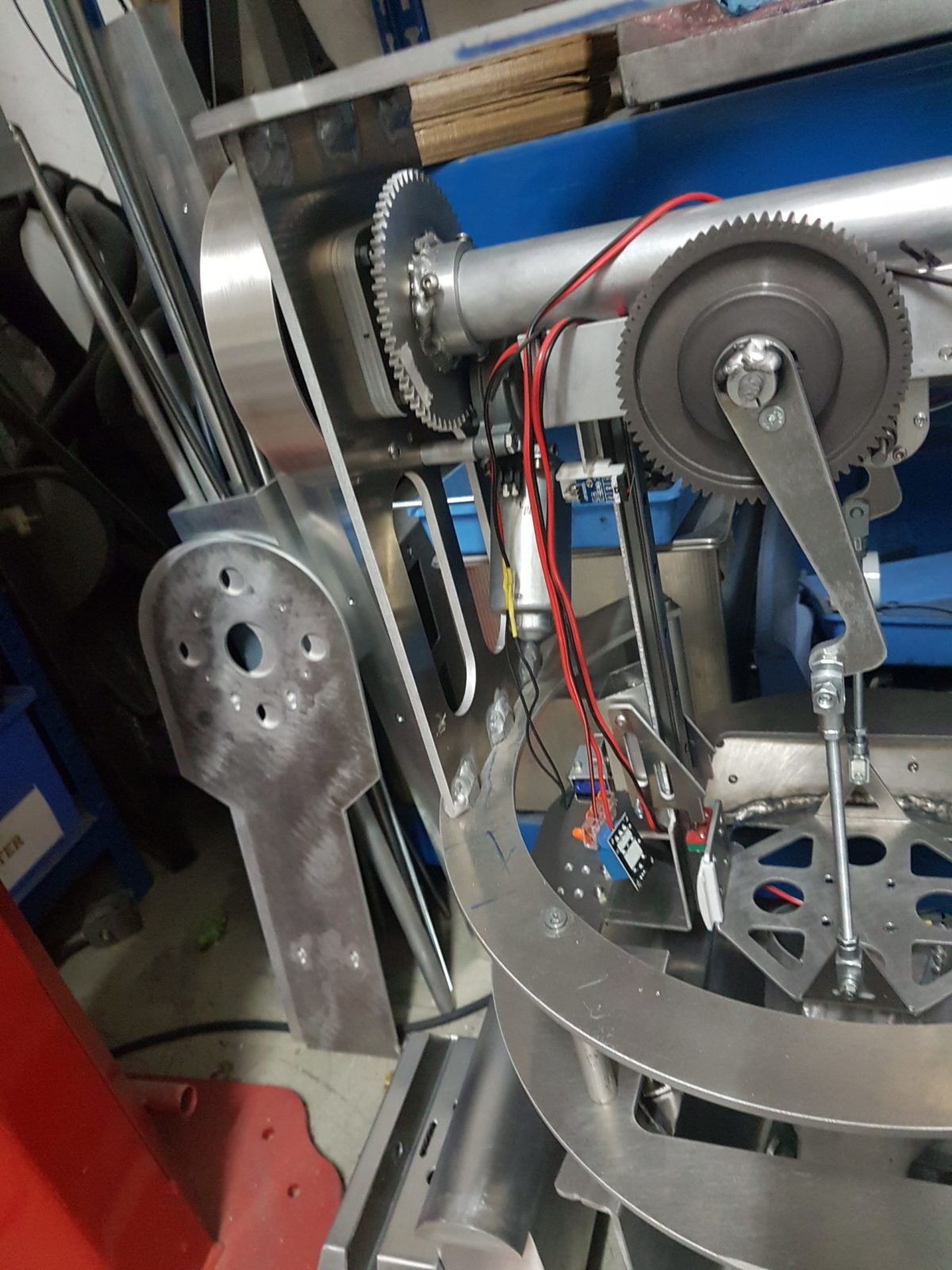


Tests für den 232 Mechanismus
Nach einer ganzen Reihe von Rückschlägen habe ich den Mechanismus für den Mittelfuß über ein Zahnrad gelöst. Hier fehlt noch die korrekte Übersetzung, aber es läuft so weit schon mal.
Hier ein Video mit einem erfolgreichen 232 Test:
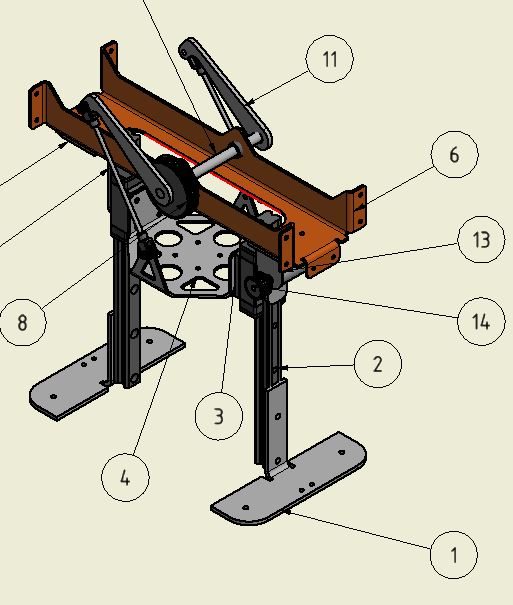
Mittelfuß Sicherung
Zusätzlich habe ich als Sicherung für den Mittelfuß eine Sperrfunktion eingebaut. Viele (fast alle) 232 Droiden haben den Schwachpunkt, dass der Mittelfuß im Fahrbetrieb nicht „verriegelt“. Dadurch sind schon einige „Umfälle“ passiert. Wenn der R2 auf mit dem Mittelfuß auf ein Hindernis fährt, klappt dieser plötzlich zurück und der Droide fällt nach vorne um.
Um dieses Problem in den Griff zu bekommen, habe ich an der unteren Position des Schlittens einfach zwei Schleppriegel pro Seite an die Linearführung gebaut. Fährt der Fuß nun von oben nach unten, gleitet er an dem Riegel vorbei und arretiert diesen automatisch. Soll der Fuß nun zurück, werden beide Sperren per Elektromagnet gelöst und der Fuß kann nach oben fahren.

Funktionstest
Hier noch ein Video mit Dome und allen Funktionen die aktuell implementiert sind.
