 Zum Inhalt springen
Zum Inhalt springen 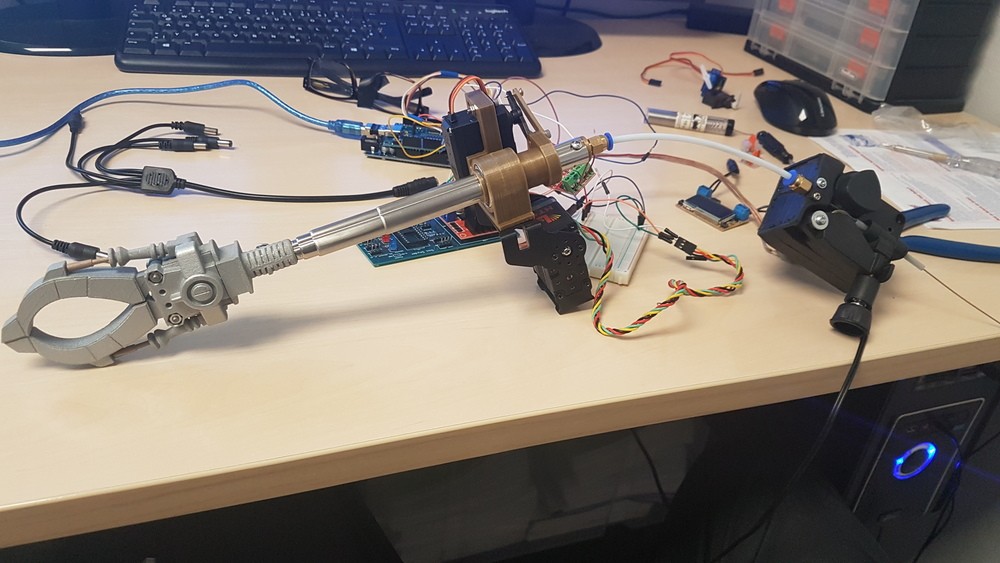
My first Controler test for the Extreme extendble Gipper Arm. the Claw is 3D Printed Design by TEXMEX . Rest is a old Selfi Stick and a Motor from a Mig Welder. MG996 Servo for rotate the Arm and for the Main Up and Down the lynx Motion HD-Servo who can handle a Lot of
torque. Finaly i add some extra 3D Parts to attach the Servos to the Arm. Electronic is a Mega2560 with USB Host Shield and two Motor driver Boards.
I use the Shadow MD Stick with a special Mode to control the Arm.
Next Step is to make some PCB for better wiring.
Here a Link to my Build Blog at ASTROMECH.NET
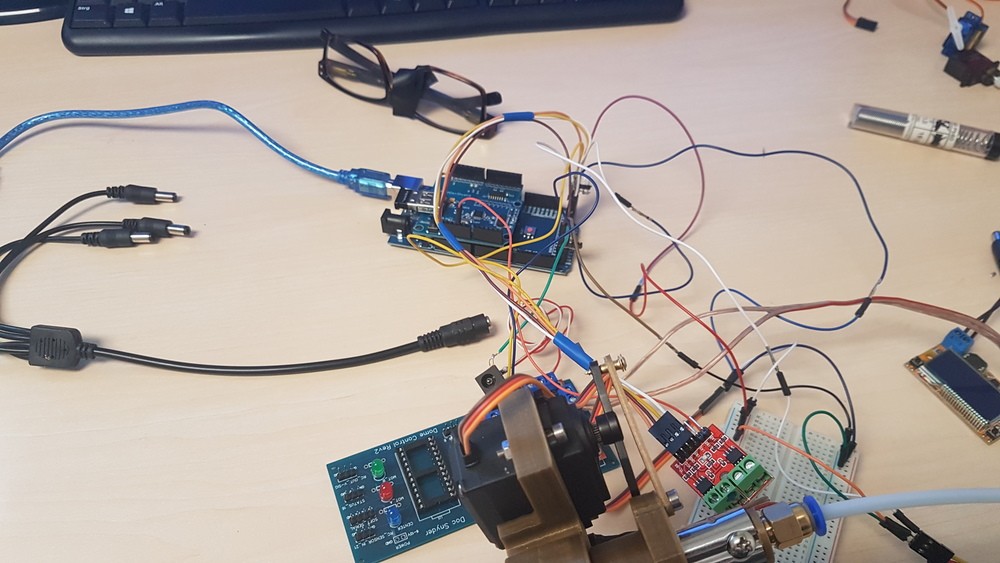

I motify the SHADOW MD sketch to support that Gripper Control from Navigon Foot Controller and in my Sketch Sabertooth is commend out for Roboteq Controler as Drive Control via PWM Pulse.
Please take care of it and feel free to contact me if you need support for that.
My Software Reposity on GitHub

Would love to understand how you extended the selfie stick!!
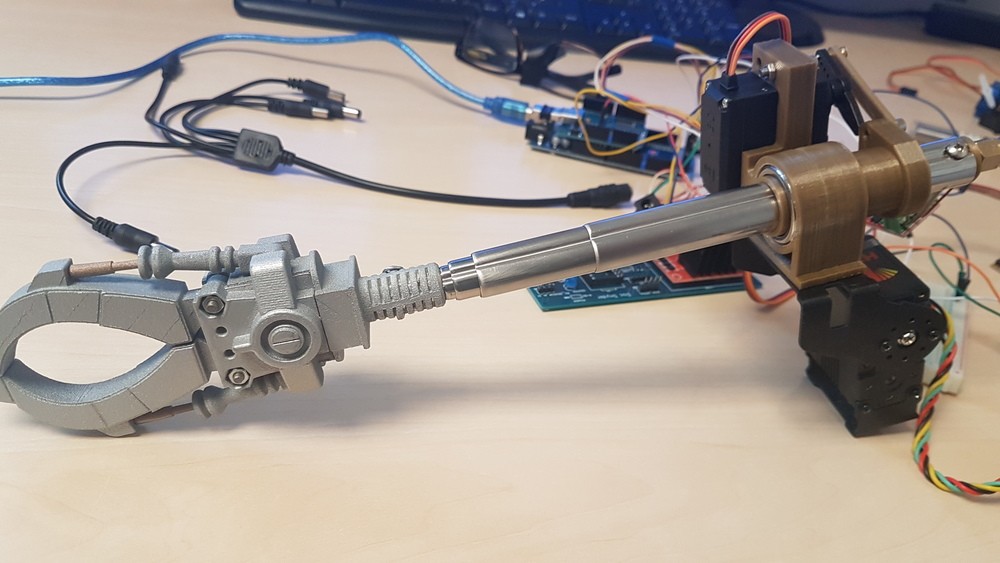
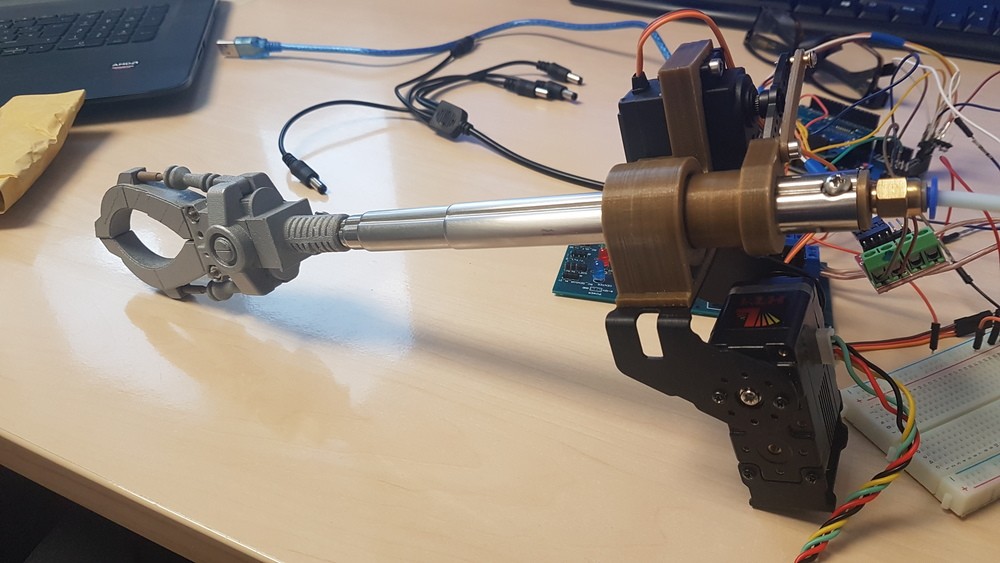
Hi David, the main issue for the Arm is that there not mutch space inside the Driod for extend 100cm. usaly you need more than 120cm to make a teleskope working. The trick is a flexible wire that powered by a old wiretransport motor from a MIG weldingmaschine.
I cut the motor and connect a tube from 3D printer to guide the wire into the teleskope. Now i can bend the wire to fit into the droid. hope that works….
You can see the „Drive-Module“ on the picture on top at the right. The white line goes from the teleskope to the motor.
I will post more info when i get that assemble into my Droid.
Fantastic Work!!!! Is that a modified Bowden with a stepper motor for extending the arm? Brilliant!
Thanks, but the motor ist not a stepper 🙂 a 3D print Filament-Wire is not strong enought. I use a steel wire.
Pingback: R2D2 can pick things up now - Motor-Block